Publications
Also on Google Scholar, ResearchGate, DBLP
(Hover over the image to magnify it)
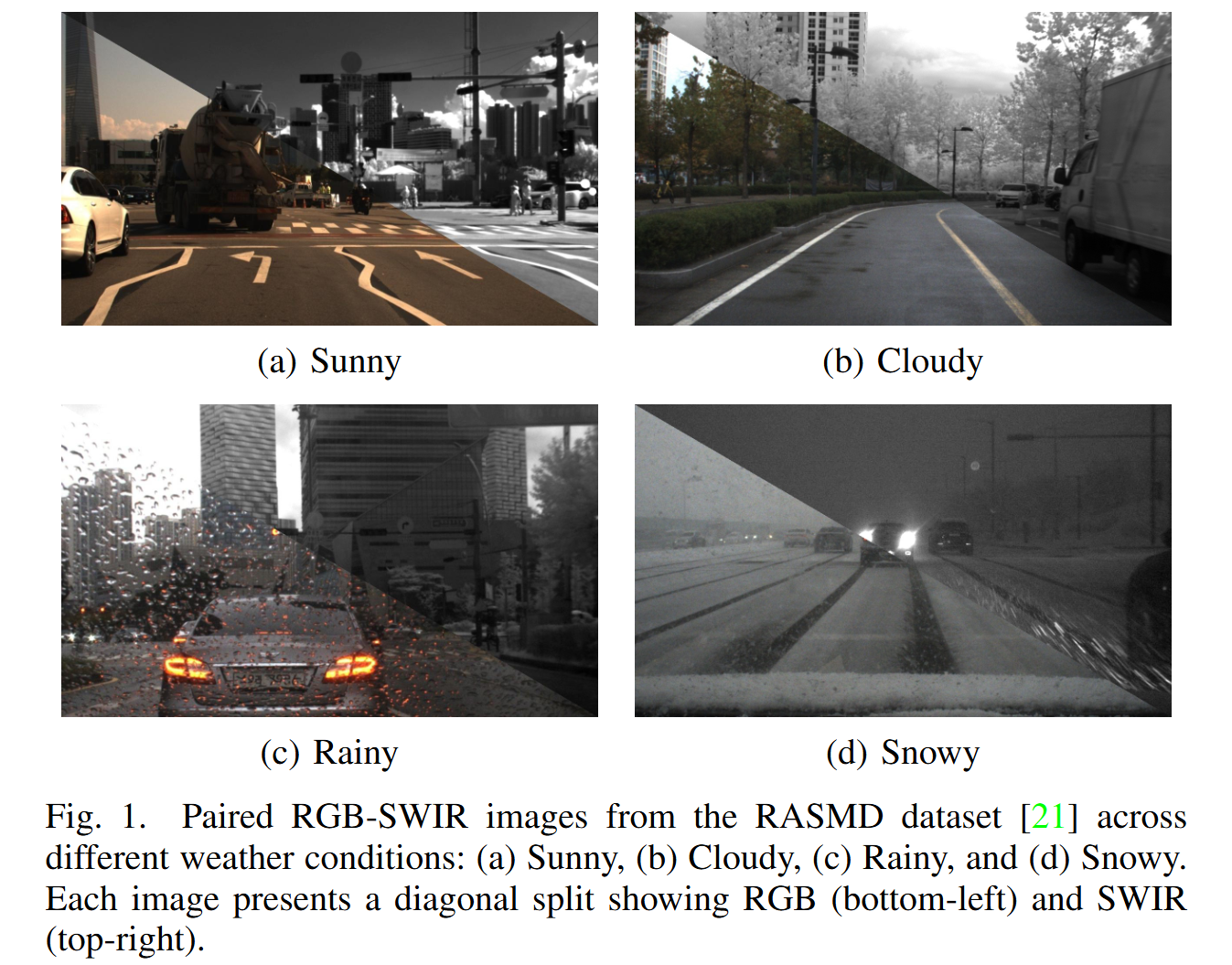
Analysis of SWIR Imaging Detection Performance Under Adverse Environmental Conditions for Autonomous Driving Systems
Short-wave infrared (SWIR) imaging has emerged as a promising modality for autonomous driving, yet its practical benefits over RGB remain poorly characterized across diverse conditions. This paper presents a systematic comparative study of paired RGB and SWIR object detection on the RASMD dataset, covering four weather conditions and two real-time detection architectures, with various fine-tunings evaluated against a unified ground truth. Overall, RGB demonstrates comparable or superior performance in most scenarios, while RF-DETR exhibits greater robustness across varying conditions. Beyond aggregate metrics, we propose a sensor-dominance mining framework that combines multi-model agreement with targeted manual inspection to identify scenarios where one sensing modality provides more reliable detections using largely unannotated paired data. This analysis reveals that SWIR offers clear advantages in four safety-critical situations, including windshield glare, water droplets on the windshield, low-contrast object visibility, and long-range vehicle detection. The findings suggest that SWIR should be viewed as a complementary modality that enhances perception in rare but challenging conditions. The datasets will be available upon request, and all code and trained model weights will be publicly released at https://github.com/comsee-research/swir-adverse-env-analysis.

Experimental study of YOLOv8 fine-tuning for RGB-SWIR multimodal road detection
@inproceedings{loumouamou:hal-05657981,
TITLE = {{{\'E}tude exp{\'e}rimentale du fine-tuning de YOLOv8 pour la d{\'e}tection routi{\`e}re multimodale RGB-SWIR}},
AUTHOR = {Loumouamou, Yannis and Riffard, Alexandre and Mehra, Rohan and Labussi{\`e}re, Mathieu},
URL = {https://hal.science/hal-05657981},
BOOKTITLE = {{Congr{\`e}s Reconnaissance des Formes, Image, Apprentissage et Perception (RFIAP 2026)}},
ADDRESS = {Montpelier, France},
YEAR = {2026},
PDF = {https://hal.science/hal-05657981v1/file/Detection_Multimodal_RGB-SWIR_RFIAP26.pdf},
HAL_ID = {hal-05657981}
}

Would SWIR modality help for detection and segmentation in harsh weather conditions? An experimental study.
@InProceedings{Mehra_2025_ICCV,
author = {Mehra, Rohan and Riffard, Alexandre and Labussière, Mathieu and Duthon, Pierre and Aufrère, Romuald},
title = {Would SWIR modality help for detection and segmentation in harsh weather conditions? An experimental study.},
booktitle = {Proceedings of the IEEE/CVF International Conference on Computer Vision (ICCV) Workshops},
month = {October},
year = {2025},
pages = {2211-2219}
}
Find all my projects and experiences in CV!